2.6 网络拥塞控制概论与实践
笔者曾做过在弱网环境下提升视频播放流畅度的工作,其中一项措施是尝试切换了 TCP 拥塞控制算法,实践由 Linux 默认的 Cubic 算法替换为 BBR 算法。调整之后大约提升了 45%的网络吞吐量,用户播放体验改善明显。
不过网络拥塞控制是一个十分发散的话题。既然实践是我们的最终目的,那就先暂时抛开理论,将实践操作和效果作为开篇。
2.6.1 使用 BBR
BBR (Bottleneck Bandwidth and Round-trip propagation time)是 Google 在 2016 年发布的一套拥塞控制算法。它尤其适合在存在一定丢包率的弱网环境下使用,在这类环境下,BBR 的性能远超 Cubic 等传统的拥塞控制算法。
- 查询系统所支持的拥塞控制算法。
$ sysctl net.ipv4.tcp_available_congestion_control net.ipv4.tcp_congestion_control = bbr cubic reno
- 查询正在使用中的拥塞控制算法。
$ sysctl net.ipv4.tcp_congestion_control net.ipv4.tcp_congestion_control = cubic
- 指定拥塞控制算法为 bbr。
$ echo net.ipv4.tcp_congestion_control=bbr >> /etc/sysctl.conf && sysctl -p
拥塞控制是单向生效,也就是说只要服务端调整了,下载速度即可提升。
- 效果测试
先使用 tc 工具设置两台服务器的收发每个方向增加 25ms 的延迟以及 1%的丢包率。
$ tc qdisc add dev eth0 root netem loss 1% latency 25ms
使用 iperf 来测试两个主机之间的 TCP 传输性能。
$ iperf3 -c 10.0.1.188 -p 8080
如表 2-3 测试结果所示,存在丢包的场景下,BBR 的性能远远强于 Cubic。
表 2-3 不同拥塞控制算法下的网络吞吐量测试
| 吞吐量 | 拥塞控制算法 | 延迟 | 丢包率 |
|---|---|---|---|
| 2.35 Gb/s | cubic | 0ms | 0% |
| 347 Mb/s | cubic | 140ms | 0% |
| 340 Mb/s | bbr | 140ms | 0% |
| 1.23 Mb/s | cubic | 140ms | 1.5% |
| 160 Mb/s | bbr | 140ms | 1.5% |
| 0.78 Mb/s | cubic | 140ms | 3% |
| 132 Mb/s | bbr | 140ms | 3% |
实践结束了,下面我们聊聊拥塞控制理论。
2.6.2 网络拥塞控制概论
Google 在 ACM 杂志上发布过一篇文章 《BBR: Congestion-Based Congestion Control》^1,内容有不少值得深入研究的地方。本节,我们借鉴该文章内容聊聊网络拥塞控制技术。
首先,互联网协议体系是基于 IP 协议实现无连接的端到端的包交换服务,无连接设计的优势灵活和健壮已经被充分证实,然而这些优势并非没有代价,不重视动态包交换会导致严重的服务降级或“Internet 熔化“,这个现象首先被观察到是在 1980 年中叶网络的早期发展阶段,在技术上称之为”拥塞崩溃“。
针对 1980 年代的拥塞崩溃,导致了 1980 年代的拥塞控制机制的出炉,某种意义上这属于见招拆招的策略。1980 年代的拥塞控制算法分为四个部分:慢启动、拥塞避免、快速重传、快速恢复。
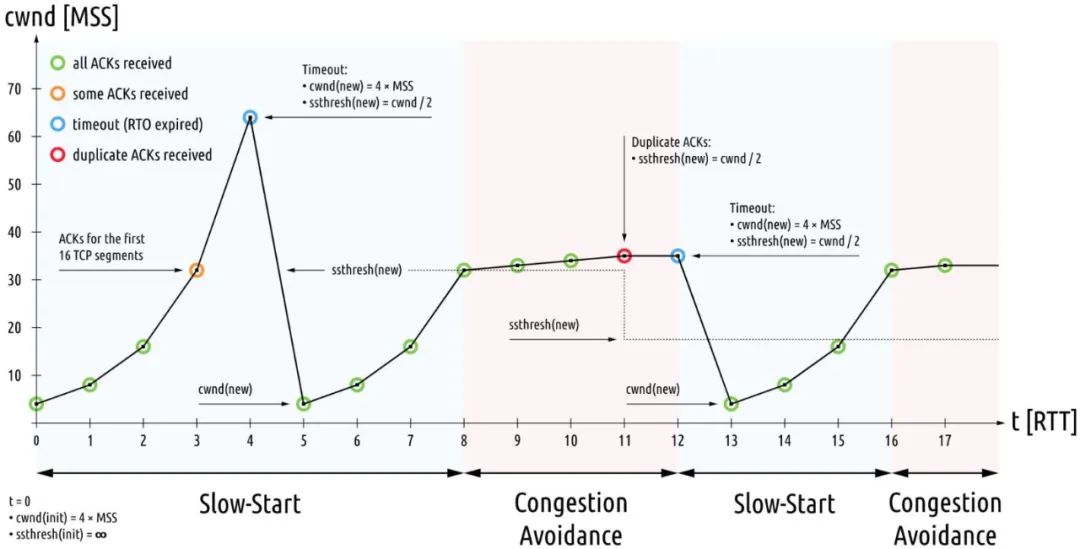
图2-21 早期拥塞控制
这些机制完美适应了 1980 年代的网络特征:低带宽、浅缓存队列,美好持续到了 2000 年代。随后互联网大爆发,多媒体应用特别是图片,音视频类的应用促使带宽必须猛增,而摩尔定律促使存储设施趋于廉价而路由器队列缓存猛增,这便是 BBR 诞生的背景。换句话说,1980 年代的拥塞控已经不适用了,2010 年代需要另外的一次见招拆招。
如果说上一次 1980 年代的拥塞控制旨在收敛,那么这一次 BBR 则旨在效能最大化。
1. 网络效能最大化
拥塞控制的目的就是寻找网络工作中的最优点,如图 2-22 所示,圆圈所示即为网络工作的最优点(上面圆圈为延迟极小值,下面圆圈为带宽极大值)。此时数据包的投递率=BtlBW(瓶颈链路带宽),保证了瓶颈链路被 100%利用;在途数据包总数=BDP(时延带宽积),保证未占用 buffer。

图2-22 网络中的最优点
然而带宽极大值和延迟极小值无法同时测得,如图 2-24 所示。要测量最大带宽,就要把瓶颈链路填满,此时 buffer 中有一定量的数据包,影响延迟指标。要测量最低延迟,就要保证 buffer 为空,此时就无法测量最大带宽值。
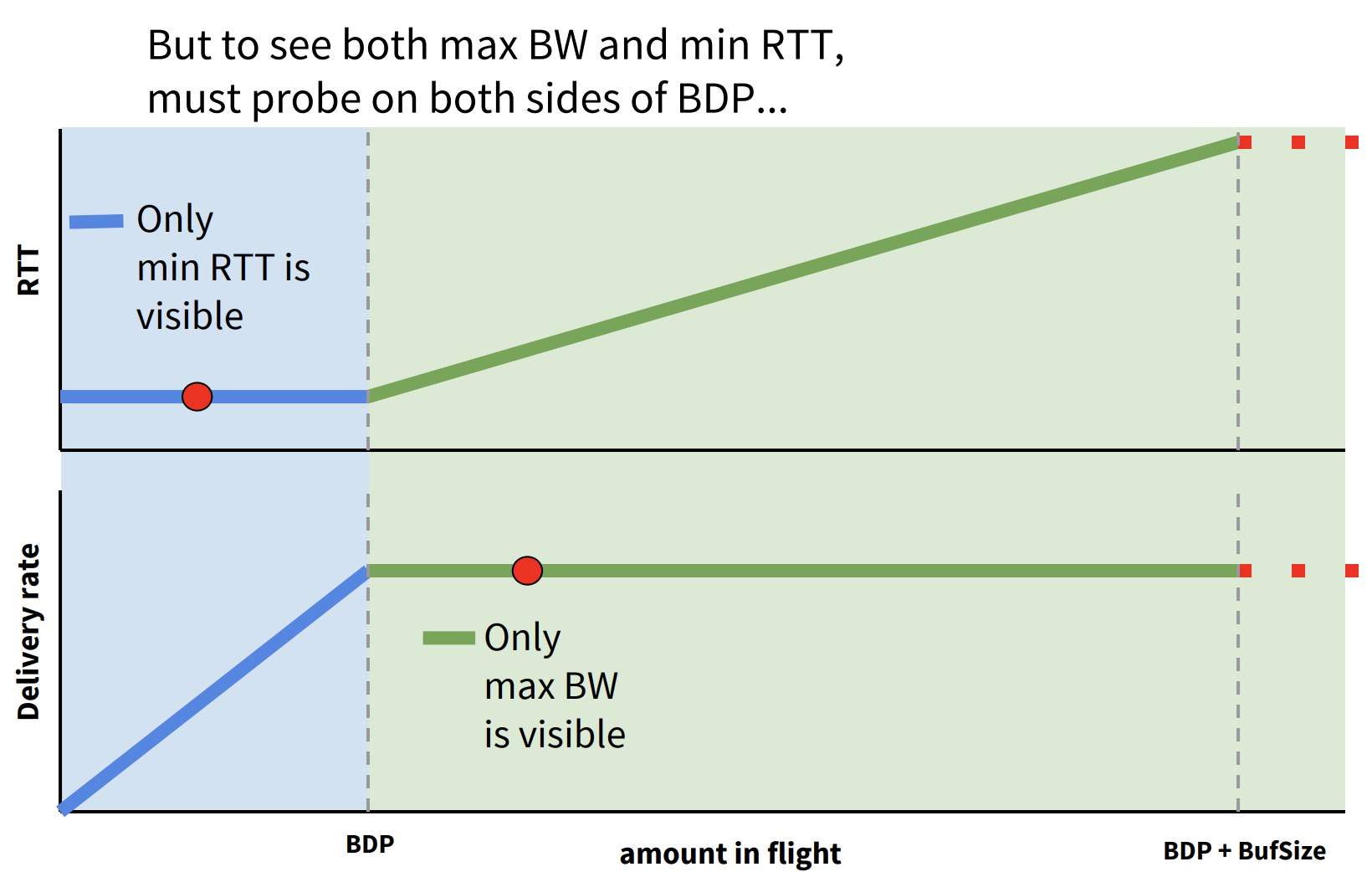
图2-24
3. BBR 设计思路
BBR 的设计思路是不再考虑丢包作为拥塞的判断条件,而是交替测量带宽和延迟,用一段时间内的带宽极大值和延迟极小值作为估计值。BBR 将控制时机提前,不再等到丢包时再进行暴力限制,而是控制稳定的发包速度,尽量榨干带宽,却又不让报文在中间设备的缓存队列上累积。为了榨干带宽,BBR 会周期性地去探测是否链路条件变好了,如果是,则加大发送速率。为了不让报文在中间设备的缓存队列上累积,BBR 会周期性地探测链路的最小 RTT,并使用该最小 RTT 计算发包速率。
4. BBR 状态机
BBR 状态机是实现以上思路的基础,使用 BBR 进行拥塞控制时,任一时刻都是处于以下四个状态之一:启动(Startup)、排空(Drain)、带宽探测(Probe Bandwidth)和时延探测(Probe RTT),其中带宽探测属于稳态,其他三个状态都是暂态,如图 2-23 所示,四个状态之间的关系。
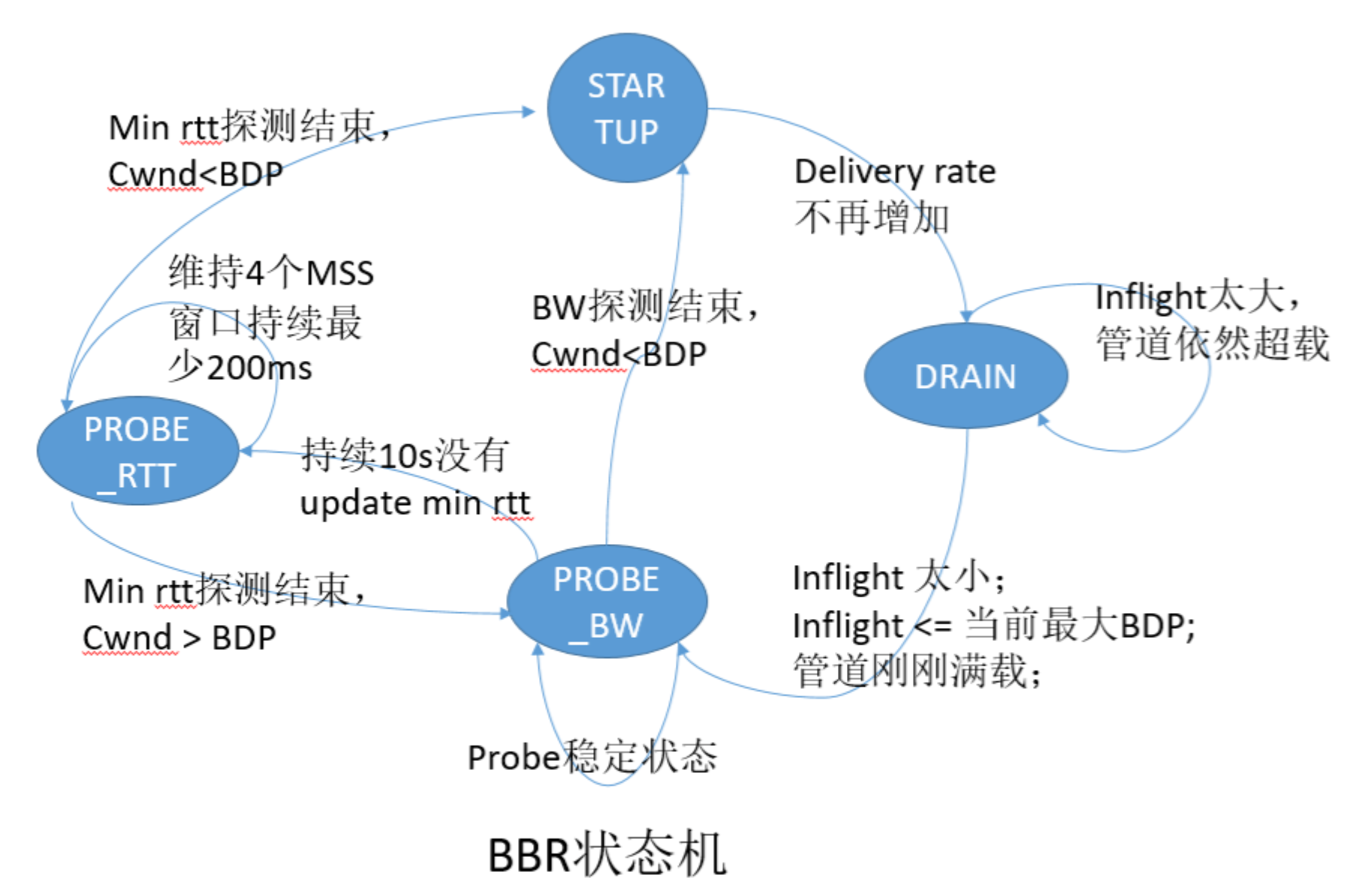
图2-23 BBR 状态转移关系
- 启动阶段(Startup):当连接建立时,BBR 采用类似标准 TCP 的慢启动方式,指数增加发送速率,目的是尽可能快的探测到带宽极大值。当判断连续时间内发送速率不再增长,说明已到达瓶颈带宽,此时状态切换至排空阶段。
- 排空阶段(Drain):该阶段指数降低发送速率(相当于启动阶段的逆过程),目的是将多占的 buffer 慢慢排空。
- 完成以上两个阶段后,BBR 进入带宽探测阶段,BBR 大部分时间都在该状态运行。当 BBR 测量到带宽极大值和延迟极小值,并且 inflight 等于 BDP 时,便开始以一个稳定的匀速维护着网络状态,偶尔小幅提速探测是否有更大带宽,偶尔小幅降速公平的让出部分带宽。
- 时延探测阶段(PROBE_RTT):如果估计延迟不变(未测量到比上周期最小 RTT 更小或等于的 RTT 值),就进入延迟探测阶段。该状态下,cwnd 被设置为 4 个 MSS,并对 RTT 重新测量,持续 200ms,超时后,根据网络带宽是否满载决定状态切换为启动阶段或带宽探测阶段。
5. BBR 实践结论
如图 2-29 所示,BBR 算法在大带宽长链路(例如跨海网络),尤其是在有轻微丢包的网络环境下,较传统的 cubic 算法有很大的提升,Cisco 的工程师 Andree Toonk 在他的博客中验证了使用不同拥塞控制算法、延迟和丢包参数所做的各种 TCP 吞吐量测试的全套测试,证明了在一定的丢包率(1.5%、3%)的情况下 BBR 的出色表现^3。

图2-29 BBR 性能测试
笔者实践结论中,通过对 Cubic 和 BBR 进行吞吐量测试,使用 BBR 后网络约提升了 30% ~ 45% 的吞吐率。
^1: 参见 https://datatracker.ietf.org/doc/html/rfc896
^2: 参见 https://research.google/pubs/pub45646/
^3: 参见 https://toonk.io/tcp-bbr-exploring-tcp-congestion-control/index.html
0 评论